Arduino — это платформа, которая позволяет создавать различные устройства и роботов. Одним из применений Arduino является создание роботележек, которые могут использоваться в различных задачах, таких как транспортировка грузов, автоматический поиск объектов и многое другое. В этой статье мы рассмотрим различные шасси для роботележек на Arduino.
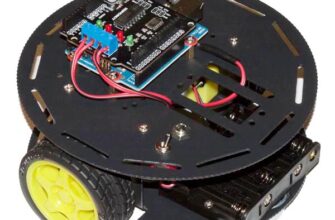
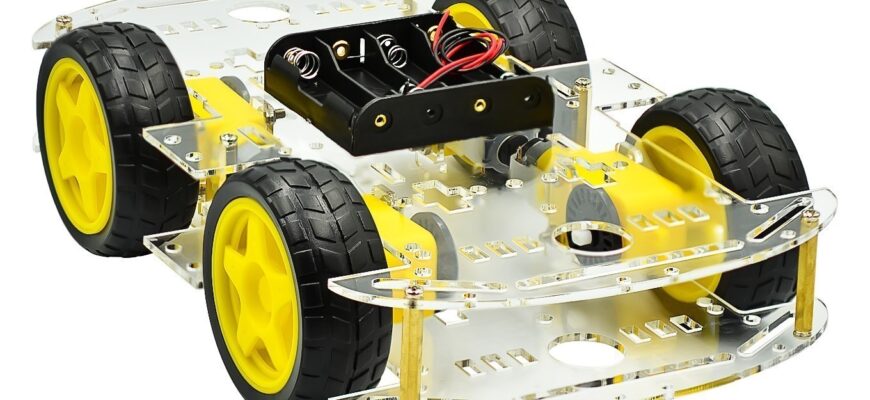
Шасси на базе колес. Это самый распространенный тип шасси для роботележек на Arduino. Они используют два или более колеса, которые могут быть управляемыми или неподвижными. Эти шасси обычно имеют двигатели, которые могут вращать колеса в разных направлениях, что позволяет роботележке двигаться вперед, назад и поворачивать. Шасси на базе колес могут использоваться в различных задачах, таких как транспортировка грузов и автоматический поиск объектов.
Шасси на базе гусениц. Эти шасси используют гусеницы вместо колес. Гусеницы обычно имеют большую площадь соприкосновения с поверхностью, что позволяет роботележке двигаться по различным поверхностям, включая неровную и грунтовую поверхность. Шасси на базе гусениц могут использоваться в таких задачах, как исследование труднодоступных мест и транспортировка грузов на неровных поверхностях.
Шасси на базе ног. Эти шасси имитируют движения животных ног. Они обычно имеют несколько ног, которые могут двигаться в разных направлениях. Эти шасси могут использоваться в таких задачах, как исследование труднодоступных мест и транспортировка грузов в труднодоступных местах.
Шасси на базе роботических рук. Эти шасси имитируют движения роботических рук. Они обычно имеют несколько рук, которые могут двигаться в разных направлениях. Эти шасси могут использоваться в таких задачах, как транспортировка грузов и выполнение сложных задач, требующих манипуляций.
Шасси на базе многоножек. Эти шасси имитируют движения многоножек насекомых. Они обычно имеют несколько ног, которые могут двигаться в разных направлениях. Эти шасси могут использоваться в таких задачах, как исследование труднодоступных мест и транспортировка грузов на неровных поверхностях.
Шасси на базе платформы. Эти шасси представляют собой плоскую платформу, на которой можно установить различные компоненты, такие как датчики, двигатели и контроллеры. Эти шасси могут использоваться в различных задачах, таких как исследование окружающей среды и транспортировка грузов.
Шасси на базе квадрокоптера. Эти шасси используют четыре ротора для подъема и движения в воздухе. Они обычно имеют встроенные датчики и камеры, которые позволяют им автоматически управляться в воздухе. Шасси на базе квадрокоптера могут использоваться в таких задачах, как исследование труднодоступных мест и доставка грузов в труднодоступные места.
Каждый тип шасси имеет свои преимущества и недостатки, и выбор зависит от конкретной задачи, которую необходимо решить. Некоторые шасси могут быть более подходящими для транспортировки грузов, в то время как другие могут быть лучше подходящими для исследования труднодоступных мест. Однако, независимо от выбранного типа шасси, Arduino позволяет создавать мощные и гибкие роботележки, которые могут использоваться в различных задачах.
Примеры роботележек представлены ниже: